Projektionslehre
[257] Projektionslehre, derjenige Teil der angewandten Geometrie, welcher lehrt, die Projektion eines im Räume befindlichen Gebildes auf eine bestimmte Ebene (die Projektionsebene, Pr.-Eb.) zu bestimmen (s.a. Abbildung, Geometrie, darstellende).
Technisch wichtig sind die folgenden Projektionsarten:
1. Man verbindet die sämtlichen Punkte eines Gegenstandes mit einem im Räume beliebig gewählten Punkte und ermittelt die Durchschnittspunkte aller Verbindungslinien mit der Projektionsebene. Man erhält eine Zentralprojektion des Gegenstandes auf die Projektionsebene. Der Punkt, durch den alle die vorhin genannten Verbindungslinien hindurchgehen, heißt das Projektionszentrum, die Verbindungslinien sind die Projektionsstrahlen oder die Projizierenden.
2. Man zieht durch alle Punkte des Gegenstandes parallele Projektionsstrahlen zu einer vorgegebenen Richtung und bestimmt die Schnittpunkte dieser Linien mit der Projektionsebene. Man erhält eine Parallelprojektion des Gegenstandes, und zwar eine rechtwinklige oder orthogonale, wenn die Projektionsstrahlen senkrecht auf der Projektionsebene stehen, und eine schiefwinklige oder klinogonale, wenn dies nicht der Fall ist.
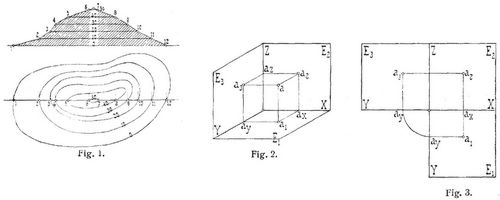
Rechtwinklige Parallelprojektion. Zur Bestimmung der Projektion eines Gegenstandes genügt eine Projektionsebene; denn in diesem Falle hat man nur nötig, von allen Punkten des Gegenstandes Senkrechte zur Projektionsebene zu fällen und deren Fußpunkte in derselben Reihenfolge zu verbinden, wie die Punkte im Räume verbunden sind; man erhält hierdurch eine rechtwinklige Projektion des Gegenstandes auf die Projektionsebene. Umgekehrt ist aber durch eine einzige Projektion eines Gegenstandes dessen Lage im Räume noch nicht bestimmt; hierzu ist vielmehr noch nötig, entweder den Abstand einer Anzahl seiner Punkte von der Projektionsebene oder aber noch eine zweite rechtwinklige Projektion desselben Gegenstandes auf eine zweite Projektionsebene zu kennen. Beide Arten des Projektionsverfahrens finden in der Tat Verwendung. Bei dem erstgenannten Verfahren gibt man sich jeden Punkt im Räume durch seine rechtwinklige Projektion auf eine Projektionsebene und außerdem seinen Abstand von der letzteren, wobei für diesen Abstand noch zu bemerken ist, nach welcher Seite der Projektionsebene er abgetragen werden muß. Diese Projektionsmethode findet praktische Verwendung bei Terraindarstellungen, z.B. in topographischen Karten, indem man sich den darzustellenden Gegenstand durch gleichweit voneinander abgehende, zur Projektionsebene parallele Ebenen durchschnitten denkt und die Projektionen dieser Schnittlinien herstellt. Man erhält dann in der Projektionsebene eine Reihe von Linien, mittels welcher sich auf die Gestalt des Gegenstandes schließen läßt. Den Abstand eines Punktes von der Projektionsebene drückt man entweder durch eine Strecke oder aber durch eine Maßzahl aus, und man nennt diese die Kote des Punktes. In Fig. 1 ist durch eine Anzahl von horizontalen Schnitten ein Terrainabschnitt dargestellt. Diese Schnitte heißen Niveaulinien, und zwar, weil die Entfernungen ihrer Ebenen untereinander gleich sind, äquidistante Niveaulinien. Die ihnen beigefügten Zahlen bezeichnen die Abstände der Ebenen der Niveaulinien von der Projektionsebene. Mittels einer vertikalen Schnittebene ist ein Profil durch den Terrainabschnitt dargestellt.
Hat man zwei Projektionsebenen, so erhält man von einem Gegenstand auf jeder Projektionsebene eine rechtwinklige Projektion, und es läßt sich hieraus auf die Lage des räumlichen Gegenstandes zu den Projektionsebenen schließen. Ist z.B. ein Punkt a (Fig. 2) im Raume gegeben und sind a1 und a2 seine Projektionen auf die Projektionsebenen E1 und E2, so denkt man sich die beiden Projektionsebenen in eine einzige Ebene, die Zeichnungsebene, gelegt (Fig. 3); dann erscheint die Schnittlinie der beiden Projektionsebenen als die Projektionsachse X, und die beiden Projektionen a1 und a2 eines Punktes a im Räume liegen auf einer Senkrechten zur X-Achse. Dabei bezeichnen die Entfernungen der Projektionen a1 und a2 von der X-Achse die Entfernungen des Punktes a von den Projektionsebenen E2 und E1, und zwar gibt die Strecke  den Abstand des Punktes a von der zweiten, die Strecke
den Abstand des Punktes a von der zweiten, die Strecke  den Abstand von a von der ersten Projektionsebene an. Hierbei ist es üblich, die erste Projektionsebene E1 als horizontal, die zweite Projektionsebene E2 als vertikal vorauszusetzen. Man bezeichnet die Projektion eines Gegenstandes auf die Projektionsebene E1 als seine Horizontalprojektion oder seinen Grundriß, die Projektion auf E2 aber als die Vertikalprojektion oder den Aufriß. Manchmal benutzt man zur näheren Darstellung eines Gegenstandes noch eine dritte Projektionsebene E3, welche auf den beiden Projektionsebenen senkrecht steht und dann Seitenebene oder Kreuzrißebene heißt; die Projektion auf sie ist ein Seitenriß oder ein Kreuzriß des Gegenstandes (s. Fig. 2 und 3).[257]
den Abstand von a von der ersten Projektionsebene an. Hierbei ist es üblich, die erste Projektionsebene E1 als horizontal, die zweite Projektionsebene E2 als vertikal vorauszusetzen. Man bezeichnet die Projektion eines Gegenstandes auf die Projektionsebene E1 als seine Horizontalprojektion oder seinen Grundriß, die Projektion auf E2 aber als die Vertikalprojektion oder den Aufriß. Manchmal benutzt man zur näheren Darstellung eines Gegenstandes noch eine dritte Projektionsebene E3, welche auf den beiden Projektionsebenen senkrecht steht und dann Seitenebene oder Kreuzrißebene heißt; die Projektion auf sie ist ein Seitenriß oder ein Kreuzriß des Gegenstandes (s. Fig. 2 und 3).[257]
Die Elemente der Darstellung durch Projektion sind der Punkt, die gerade und die krumme Linie, die ebene Fläche und der von ebenen oder krummen Flächen begrenzte Körper. – Ein Punkt projiziert sich stets wieder als ein Punkt, eine Gerade in der Regel wieder als Gerade, falls sie auf einer Projektionsebene senkrecht steht, als ein Punkt. Eine krumme Linie hat im allgemeinen als Projektion wieder eine krumme Linie; nur wenn die Kurve eben ist und ihre Ebene senkrecht zu einer Projektionsebene steht, ist die Projektion auf diese Ebene geradlinig. Die Projektion eines Körpers ist gebildet durch einen bestimmten Teil der Projektionsebene, die Begrenzungslinie der Projektion bildet den scheinbaren Umriß des Körpers. Bei der ebenen Fläche wird man im allgemeinen von einer eigentlichen Projektion nicht sprechen können, weil, wenn die Ebene gegen beide Projektionsebenen beliebig geneigt ist und als unbegrenzt vorausgesetzt gedacht wird, jeder Punkt der Projektionsebene als Projektion eines Punktes der Ebene angesehen werden kann. Nur wenn die Ebene auf einer Projektionsebene senkrecht steht, kann ihr Schnitt mit dieser Ebene als Projektion auf letztere aufgefaßt werden. Ist die Ebene gegen beide Projektionsebenen beliebig geneigt, so wird ihre Lage gegen die Projektionsebene festgesetzt werden durch gewisse Bestimmungsstücke, welche ihr angehören. Solche Bestimmungsstücke sind beispielsweise drei nicht in einer geraden Linie liegende Punkte, zwei sich schneidende oder zwei parallele Gerade, eine Gerade und ein nicht auf ihr liegender Punkt u.s.w.
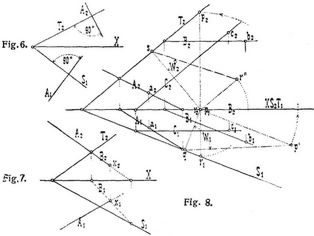
In der Fig. 4 ist eine Gerade a b durch ihre Projektionen auf die beiden Projektionsebenen E1 und E2 dargestellt; es unterliegt keiner Schwierigkeit, ihre Lage zu den beiden Projektionsebenen zu ermitteln. Konstruiert man nämlich die bei a1 und b1 bezw. a2 und b2 rechtwinkligen Trapeze a1 a' b' b1 und a2 a'' b'' b2, so daß die Längen
die Abstände der Punkte a und b von der ersten, die Längen
die Abstände derselben Punkte von der zweiten Projektionsebene darstellen, so hat man in den Strecken  und
und  und die wahre Länge der Geraden a b. konstruiert. Gleichzeitig geben die Winkel w1 und w2 die Neigungswinkel der Geraden a b mit den Projektionsebenen E1 und E2 an. Auch die Lage einer Ebene gegen die Projektionsebenen läßt sich aus den durch ihre Projektionen dargestellten Bestimmungsstücken der Ebene leicht ermitteln. Ist z.B. eine Ebene (s. Fig. 5) durch zwei in einem Punkt a sich schneidende Geraden B und C dargestellt, so findet man zunächst die Durchschnittspunkte b1 und c1 der Geraden B und C mit der Projektionsebene E1 und damit in der Verbindungslinie b1 c1 die Durchschnittslinie der Ebene mit der Projektionsebene. Zeichnet man nun das Dreieck a1 α a' so, daß a1 α senkrecht zu b1 c1 und a1, a' parallel zu b1 c1 und gleich dem Abstand a2 ax des Punktes a von der Projektionsebene E1 ist, so schließen die Linien a' α und a1 α bei α den Winkel W1 der Ebene B C mit der Projektionsebene E1 ein. Denkt man sich außerdem die Ebene B C um ihre Schnittlinie b1 c1 mit der Projektionsebene E1 in letztere umgelegt, so kommt der Punkt a nach a'' in die Verlängerung von a1 α zu liegen, so daß
und die wahre Länge der Geraden a b. konstruiert. Gleichzeitig geben die Winkel w1 und w2 die Neigungswinkel der Geraden a b mit den Projektionsebenen E1 und E2 an. Auch die Lage einer Ebene gegen die Projektionsebenen läßt sich aus den durch ihre Projektionen dargestellten Bestimmungsstücken der Ebene leicht ermitteln. Ist z.B. eine Ebene (s. Fig. 5) durch zwei in einem Punkt a sich schneidende Geraden B und C dargestellt, so findet man zunächst die Durchschnittspunkte b1 und c1 der Geraden B und C mit der Projektionsebene E1 und damit in der Verbindungslinie b1 c1 die Durchschnittslinie der Ebene mit der Projektionsebene. Zeichnet man nun das Dreieck a1 α a' so, daß a1 α senkrecht zu b1 c1 und a1, a' parallel zu b1 c1 und gleich dem Abstand a2 ax des Punktes a von der Projektionsebene E1 ist, so schließen die Linien a' α und a1 α bei α den Winkel W1 der Ebene B C mit der Projektionsebene E1 ein. Denkt man sich außerdem die Ebene B C um ihre Schnittlinie b1 c1 mit der Projektionsebene E1 in letztere umgelegt, so kommt der Punkt a nach a'' in die Verlängerung von a1 α zu liegen, so daß
ist, und die beiden Linien B', C', welche durch b1 und c1 hindurchgehen, schließen denselben Winkel W ein wie die Winkel B und C im Raume.
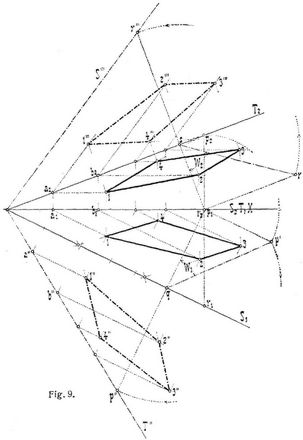
Eine bequeme Darstellung der Ebene ist jene durch ihre Spuren, d.h. durch ihre Schnittlinien 5 und T mit den Projektionsebenen (s. Fig. 6). Soll in der Ebene eine Gerade angenommen werden, so kann man eine ihrer Projektionen, z.B. den Aufriß A2, beliebig; wählen, während ihr Grundriß A1 durch Projizieren zu bestimmen ist. Besondere Geraden der Ebenen sind die Spurparallelen, von welchen es zwei Scharen gibt; die eine Schar, von welcher B eine Gerade darstellt, läuft parallel zur ersten, die andre Schar, zu weicher die Gerade C gehört, ist parallel zur zweiten Spur. Die Geraden der Ebene können benutzt werden, um Punkte in der Ebene zu zeichnen. Wählt man z.B. den Punkt a1 auf A1 beliebig, so ist a2 auf A2 bestimmt; so gehören auch die Punkte b und c, weil auf den Geraden B und C liegend, der Ebene an. Der Schnittpunkt einer Geraden A mit einer Ebene (s. Fig. 7) bestimmt sich in einfacher Weise, indem man die eine Projektion der Geraden, z.B. A2 als Aufriß B2 einer Geraden B der Ebene auffaßt und ihren Grundriß B1 ermittelt, welcher A1 im Grundriß x1 des Schnittpunktes x der [258] Geraden A und der Ebene trifft. Den Neigungswinkel einer Ebene mit den Projektionsebenen ermittelt man, indem man auf T den Punkt p wählt (s. Fig. 6), p1 q senkrecht zu S1 und p1 p' parallel zu S1 und gleich  zieht. Die Verbindungslinie p' q schließt mit p1 q1 den Neigungswinkel W1 der Ebene mit der Grundrißebene ein. Mittels des Punktes r ist in dem Dreieck r2 s r'' der Winkel W2 der Ebene mit der Aufrißebene ermittelt worden. Stehen die Projektionen A1 und A2 einer Geraden A bezw. normal zu den Spurrichtungen der Ebene (s. Fig. 8), so steht die Gerade A selbst normal zur Ebene. Die Bestimmung der wahren Gestalt einer in der Ebene liegenden Figur geschieht auf zweierlei Art; entweder durch Umlegung der Ebene um ihre erste Spur S1 in die Grundrißebene, oder um T2 in die Aufrißebene. Dabei wählt man auf der zweiten bezw. ersten Spur einen Punkt p bezw. r der Ebene, bestimmt dessen Umlegung in die betreffende Projektionsebene, wodurch auch die Umlegungen der übrigen Punkte der Ebene bestimmt sind. Nebenstehende Fig. 9 zeigt dieses Verfahren; hierbei ist z.B.
zieht. Die Verbindungslinie p' q schließt mit p1 q1 den Neigungswinkel W1 der Ebene mit der Grundrißebene ein. Mittels des Punktes r ist in dem Dreieck r2 s r'' der Winkel W2 der Ebene mit der Aufrißebene ermittelt worden. Stehen die Projektionen A1 und A2 einer Geraden A bezw. normal zu den Spurrichtungen der Ebene (s. Fig. 8), so steht die Gerade A selbst normal zur Ebene. Die Bestimmung der wahren Gestalt einer in der Ebene liegenden Figur geschieht auf zweierlei Art; entweder durch Umlegung der Ebene um ihre erste Spur S1 in die Grundrißebene, oder um T2 in die Aufrißebene. Dabei wählt man auf der zweiten bezw. ersten Spur einen Punkt p bezw. r der Ebene, bestimmt dessen Umlegung in die betreffende Projektionsebene, wodurch auch die Umlegungen der übrigen Punkte der Ebene bestimmt sind. Nebenstehende Fig. 9 zeigt dieses Verfahren; hierbei ist z.B.
u.s.w.
Neigungswinkel einer Geraden mit einer Ebene. Man wählt auf der Geraden einen Punkt willkürlich, fällt von ihm eine Senkrechte zur Ebene und ermittelt den Winkel dieser Senkrechten mit der gegebenen Geraden; sein Komplementswinkel ist gleich dem Winkel von Gerade und Ebene.
Winkel zweier Ebenen: Man fällt von einem beliebigen Punkte Senkrechte auf beide Ebenen. Je nach der Wahl des Punktes schließen diese Senkrechten einen Winkel gleich dem Winkel der beiden Ebenen oder deren Supplementswinkel ein.
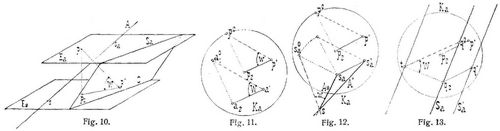
Schiefwinklige Parallelprojektion. Bei der schiefwinkligen Parallelprojektion sind die Projektionsstrahlen gegen die Projektionsebene nicht normal gerichtet, sondern unter einem beliebigen Winkel gegen diese geneigt. Um in schiefer Projektion geometrische Konstruktionen durchführen zu können, bedient man sich verschiedener Verfahrungsarten. Man wählt z.B. (Fig. 10) parallel zur Projektionsebene eine zweite Ebene, die Abstandsebene Ea, in beliebigem Abstande von der Projektionsebene und gibt sich deren Abstand  von der Projektionsebene durch den in der Projektionsebene um den Punkt p2 mit dem Abstand beschriebenen Kreis Ka, den Abstandskreis (vgl. Fig. 11). Gibt man sich außerdem die schiefwinklige Projektion p' des in der Abstandsebene liegenden Punktes p, so ist durch p2 p' die Projektionsrichtung bestimmt. Die durch p2 zu p2 p' gezogene Senkrechte schneidet den Abstandskreis Ka in einem Punkte p0, dessen Verbindungslinie p0 p' mit p2 p' den Winkel W der Projektionsrichtung mit der Projektionsebene einschließt. Die Darstellung eines Punktes a (Fig. 11) geschieht durch seine rechtwinklige und schiefwinklige Projektion a2 bezw. a' auf die Projektionsebene, wobei die Verbindungslinie a2 a' stets parallel zur Verbindungslinie p2 p' sein muß. Zeichnet man nun das Dreieck a2 a' a0 ähnlich und ähnlich gelegen dem Dreieck p2 p' p0, so gibt die Strecke
von der Projektionsebene durch den in der Projektionsebene um den Punkt p2 mit dem Abstand beschriebenen Kreis Ka, den Abstandskreis (vgl. Fig. 11). Gibt man sich außerdem die schiefwinklige Projektion p' des in der Abstandsebene liegenden Punktes p, so ist durch p2 p' die Projektionsrichtung bestimmt. Die durch p2 zu p2 p' gezogene Senkrechte schneidet den Abstandskreis Ka in einem Punkte p0, dessen Verbindungslinie p0 p' mit p2 p' den Winkel W der Projektionsrichtung mit der Projektionsebene einschließt. Die Darstellung eines Punktes a (Fig. 11) geschieht durch seine rechtwinklige und schiefwinklige Projektion a2 bezw. a' auf die Projektionsebene, wobei die Verbindungslinie a2 a' stets parallel zur Verbindungslinie p2 p' sein muß. Zeichnet man nun das Dreieck a2 a' a0 ähnlich und ähnlich gelegen dem Dreieck p2 p' p0, so gibt die Strecke  den Abstand des Punktes a von der Projektionsebene an. Zur Darstellung von Geraden und Ebenen benutzt man deren Durchschnitte mit der Abstandsebene Ea, indem man deren schiefe Projektionen als bekannt voraussetzt und außerdem die Durchschnitte dieser Gebilde mit der Projektionsebene als gegeben annimmt. Ist z.B. eine Gerade A (Fig. 12) durch ihren Durchschnitt s mit der Projektionsebene und die schiefe Projektion sa' ihres Schnittes mit der Abstandsebene Ea gegeben, so erhält man, wenn man
den Abstand des Punktes a von der Projektionsebene an. Zur Darstellung von Geraden und Ebenen benutzt man deren Durchschnitte mit der Abstandsebene Ea, indem man deren schiefe Projektionen als bekannt voraussetzt und außerdem die Durchschnitte dieser Gebilde mit der Projektionsebene als gegeben annimmt. Ist z.B. eine Gerade A (Fig. 12) durch ihren Durchschnitt s mit der Projektionsebene und die schiefe Projektion sa' ihres Schnittes mit der Abstandsebene Ea gegeben, so erhält man, wenn man  gleich und gleich gerichtet p' p2 zieht, in s sa die rechtwinklige Projektion A2 der Geraden. Zieht man nun in sa zu A2 die Senkrechte sa sa0 gleich dem Halbmesser des Abstandskreises Ka, so schließt die Verbindungslinie sa0 s mit sa s den Neigungswinkel
[259] W der Geraden mit der Projektionsebene ein. Ist ebenso (Fig. 13) durch Sa Sa' eine Ebene in schiefer Projektion dargestellt, so wählt man auf Sa' einen Punkt q' beliebig, zieht q' q2 gleich und gleich gerichtet p' p2, so geht durch q2 die rechtwinklige Projektion Sa der Schnittlinie der gegebenen Ebene mit der Abstandsebene. Zieht man nun q2 t senkrecht zu S und macht
gleich und gleich gerichtet p' p2 zieht, in s sa die rechtwinklige Projektion A2 der Geraden. Zieht man nun in sa zu A2 die Senkrechte sa sa0 gleich dem Halbmesser des Abstandskreises Ka, so schließt die Verbindungslinie sa0 s mit sa s den Neigungswinkel
[259] W der Geraden mit der Projektionsebene ein. Ist ebenso (Fig. 13) durch Sa Sa' eine Ebene in schiefer Projektion dargestellt, so wählt man auf Sa' einen Punkt q' beliebig, zieht q' q2 gleich und gleich gerichtet p' p2, so geht durch q2 die rechtwinklige Projektion Sa der Schnittlinie der gegebenen Ebene mit der Abstandsebene. Zieht man nun q2 t senkrecht zu S und macht  gleich dem Halbmesser des Abstandskreises Ka, so schließt die Verbindungslinie q0 t mit q2 t den Neigungswinkel W der Ebene mit der Projektionsebene ein.
gleich dem Halbmesser des Abstandskreises Ka, so schließt die Verbindungslinie q0 t mit q2 t den Neigungswinkel W der Ebene mit der Projektionsebene ein.
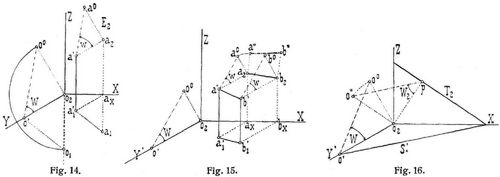
Ein andres Darstellungsverfahren in schiefwinkliger Parallelprojektion besteht darin, daß man einen Gegenstand mit seinem Grundriß etwa in die Aufrißebene unter einem von 90° verschiedenen Winkel W projiziert und jeden Punkt zur Darstellung bringt durch seine schiefe Projektion auf die Projektionsebene und die seines Grundrisses. Zur Ausführung von geometrischen Konstruktionen muß dann noch die Projektionsrichtung und ihr Winkel mit der Projektionsebene bekannt sein. In der Fig. 14 ist ein Punkt a durch seine schiefe Projektion a1 und diejenige a1' seines Grundrisses gegeben. Die Projektionsrichtung ist parallel zur Geraden Y und gegen die Projektionsebene unter dem Winkel W geneigt. Die Lage des Punktes a gegen die Projektionsebene läßt sich nun in einfacher Weise ermitteln. Faßt man 02 als die rechtwinklige Projektion eines Punktes 0 auf der Geraden Y, dessen schiefe Projektion der Punkt 0' ist, auf, so gibt 02 00 den Abstand des Punktes 0 von der Projektionsebene an. Legt man nun die Ebene X Y um die Gerade X in die Ebene Z X um, so kommt der Punkt 0 nach 01, so daß
ist, und 01 ist die rechtwinklige Projektion des Punktes 0 auf die Ebene X Y, d.h. die Projektionsebene E1; aus a' und a1' bestimmt sich nun a2 und mittels der Senkrechten durch a2 zu a' a2 und der Parallelen durch a' zu 0' 00 der Abstand  des Punktes a von der Projektionsebene E2. Die rechtwinklige Projektion a1 ergibt sich in zweifacher Weise, entweder durch Abtragen der Strecke nach
des Punktes a von der Projektionsebene E2. Die rechtwinklige Projektion a1 ergibt sich in zweifacher Weise, entweder durch Abtragen der Strecke nach  oder durch Ziehen der Parallelen a1' a1 zu 0' 01. Handelt es sich um die Ermittlung der Lage einer Geraden zur Ebene, so geschieht dies ebenfalls in einfacher Weise. Man verschafft sich zunächst (Fig. 15) die rechtwinkligen Projektionen a2 und b2 der Punkte a und b; hierauf ihre Abstände und
oder durch Ziehen der Parallelen a1' a1 zu 0' 01. Handelt es sich um die Ermittlung der Lage einer Geraden zur Ebene, so geschieht dies ebenfalls in einfacher Weise. Man verschafft sich zunächst (Fig. 15) die rechtwinkligen Projektionen a2 und b2 der Punkte a und b; hierauf ihre Abstände und  von der Projektionsebene. Mittels des Trapezes a2 a'' b'' b2 ergibt sich dann die wahre Länge der Geraden a b und ihr Neigungswinkel zur Projektionsebene. – Ist eine Ebene durch ihre Schnittlinie T2 und S1' (Fig. 16) mit den Ebenen X Z und X Y gegeben, so hat man nur von dem Punkte o2 zu T2 die Senkrechte o2 p zu zeichnen und das Dreieck o2 p o'', o2 p senkrecht T2, o'' o2 senkrecht o2 p und gleich o2 o0 zu konstruieren, dann enthält dasselbe bei p den Neigungswinkel W2 der Ebene mit der Projektionsebene E2.
von der Projektionsebene. Mittels des Trapezes a2 a'' b'' b2 ergibt sich dann die wahre Länge der Geraden a b und ihr Neigungswinkel zur Projektionsebene. – Ist eine Ebene durch ihre Schnittlinie T2 und S1' (Fig. 16) mit den Ebenen X Z und X Y gegeben, so hat man nur von dem Punkte o2 zu T2 die Senkrechte o2 p zu zeichnen und das Dreieck o2 p o'', o2 p senkrecht T2, o'' o2 senkrecht o2 p und gleich o2 o0 zu konstruieren, dann enthält dasselbe bei p den Neigungswinkel W2 der Ebene mit der Projektionsebene E2.
Die im vorstehenden behandelte schiefe Parallelprojektion findet in der Technik vielfach Verwendung, namentlich für den Fall, daß die Projektionsrichtung Y unter 45° gegen die X-Achse geneigt ist und auch der Winkel W ebenfalls 45° beträgt. In diesem Fall führt die Projektionsart die Bezeichnung Kavalierperspektive.
Zentralprojektion. Wenn man von allen Punkten eines Gegenstandes Strahlen nach einem nicht in der Bildebene gelegenen Punkte, dem Projektionszentrum, zieht und deren Durchschnittspunkte mit der Bildebene ermittelt, so gibt die Gesamtheit aller dieser Durchschnittspunkte mit der Bildebene in letzterer die Zentralprojektion des Gegenstandes. Fällt das Projektionszentrum mit dem Auge des Beobachters zusammen und befindet sich die Bildebene zwischen dem Gegenstande und dem betrachtenden Auge, so heißt in diesem Falle die Zentralprojektion eine Zentralperspektive des Gegenstandes. – Die Zentralprojektion eines Punktes ist also wieder ein Punkt, jene einer Geraden im allgemeinen wieder eine Gerade, und nur dann, wenn die Gerade durch das Projektionszentrum selbst geht, ein Punkt. Bei einer unbegrenzten Ebene kann man von einer Zentralprojektion im eigentlichen Sinne nicht sprechen, es wird vielmehr die ganze Bildebene als die Zentralprojektion einer Ebene aufgefaßt werden können. Zur Feststellung der Lage der Ebene gegen die Bildebene genügt es, eine Anzahl von Bestimmungsstücken der Ebene durch Zentralprojektion darzustellen. Ist man imstande, die Elemente Punkt, Gerade und Ebene durch Zentralprojektion darzustellen, so kann damit auch die Zentralprojektion eines jeden Gegenstandes hergestellt werden, der aus den genannten Elementen zusammengesetzt ist. – Ist nun a (s. Fig. 17) ein Punkt im Raum, o das Projektionszentrum,
[260] E2 die Bildebene, so ergibt sich die Zentralprojektion a' von a, indem man die rechtwinklige Projektion a2 von a mit der rechtwinkligen Projektion o2 des Zentrums (Hauptpunkt) verbindet und diese Verbindungslinie mit dem Strahle o a durchschneidet. Als Bildebene wird in der Regel die Aufrißebene gewählt: es liegt dann die Zentralprojektion eines Punktes a stets auf der Verbindungslinie seines Aufrisses a2 (s. Fig. 18) mit dem Augpunkte, und ist der innere Teilungspunkt der Strecke  , der diese in dem Verhältnis
, der diese in dem Verhältnis  teilt. Hierbei bezeichnet
teilt. Hierbei bezeichnet  den Abstand des in Rede stehenden Punktes von der Bildebene und
den Abstand des in Rede stehenden Punktes von der Bildebene und  den Abstand des Zentrums von dieser Ebene oder die Distanz.
den Abstand des Zentrums von dieser Ebene oder die Distanz.
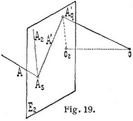
Die Zentralprojektion einer Geraden (z.B. A, Fig. 19) ist bestimmt durch die Zentralprojektionen zweier Punkte in ihr; als solche Punkte wählt man zweckmäßig einerseits ihren Durchschnittspunkt As, d.h. ihre Spur mit der Bildebene, anderseits den Schnittpunkt Aq' eines Parallelstrahles zu der Geraden durch das Zentrum o mit der Bildebene; letzteren Punkt bezeichnet man als die Flucht der Geraden. Die Verbindungslinie o2 Aq' ist hierbei parallel zur rechtwinkligen Projektion A2 der Geraden. Alle zur Geraden A parallelen Geraden besitzen den nämlichen Parallelstrahl; folglich haben die Zentralprojektionen von parallelen Geraden den Fluchtpunkt gemeinsam. Stehen die Geraden zur Bildebene senkrecht, so fällt ihr Fluchtpunkt mit dem Hauptpunkt zusammen; sind die Geraden unter 45° zur Bildebene geneigt, so liegen ihre Fluchtpunkte auf einem Kreise, der den Hauptpunkt als Mittelpunkt und die Distanz als Halbmesser besitzt und Distanzkreis heißt. Sind die Geraden zur Bildebene parallel, so sind auch ihre Zentralprojektionen parallel.
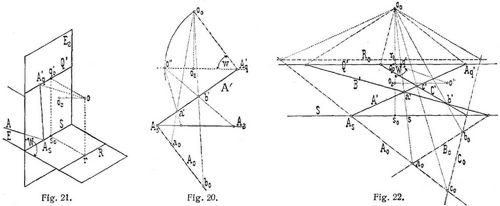
Ist nun (Fig. 20) As die Spur, Aq' die Flucht einer Geraden A, so gibt die Verbindungslinie As Aq' die Zentralprojektion A' von A : der Aufriß A2 ist parallel zu o2 Aq'. Zieht man zu o2 Aq' die Senkrechte  gleich der Distanz, so stellt die Verbindungslinie o0 Aq' den mit der Ebene o o2 Aq' in die Bildebene umgelegten Parallelstrahl zur Geraden A dar und der Winkel w bezeichnet den Neigungswinkel der Geraden A mit der Bildebene. Die Umlegung der Geraden A in die Bildebene geht durch As parallel zu o0 Aq'. Sind also a' b' zwei Punkte auf der Zentralprojektion A' von A, so schneiden die Verbindungslinien o0 a' und o0 b' auf A0 die Punkte a0 b0 aus, deren Entfernung voneinander gleich ist der wahren Länge der Strecke a b. Der Punkt o0, d.i. das umgelegte Zentrum, heißt der Teilungspunkt der Geraden A. Zur Geraden A gehören unzählig viele Teilungspunkte; sie liegen alle auf einem um Aq' als Mittelpunkt mit einem Halbmesser gleich Aq' o0 beschriebenen Kreise, dem Teilungskreise von A. Wählt man auf diesem Kreise einen beliebigen Punkt o'' und zieht durch As eine Parallele A'' zu o'' Aq', so liefern die Strahlen o'' a' und o'' b' auf A'' (A'' fällt im vorliegenden Falle mit A2 zusammen) ebenfalls die wahre Länge von
gleich der Distanz, so stellt die Verbindungslinie o0 Aq' den mit der Ebene o o2 Aq' in die Bildebene umgelegten Parallelstrahl zur Geraden A dar und der Winkel w bezeichnet den Neigungswinkel der Geraden A mit der Bildebene. Die Umlegung der Geraden A in die Bildebene geht durch As parallel zu o0 Aq'. Sind also a' b' zwei Punkte auf der Zentralprojektion A' von A, so schneiden die Verbindungslinien o0 a' und o0 b' auf A0 die Punkte a0 b0 aus, deren Entfernung voneinander gleich ist der wahren Länge der Strecke a b. Der Punkt o0, d.i. das umgelegte Zentrum, heißt der Teilungspunkt der Geraden A. Zur Geraden A gehören unzählig viele Teilungspunkte; sie liegen alle auf einem um Aq' als Mittelpunkt mit einem Halbmesser gleich Aq' o0 beschriebenen Kreise, dem Teilungskreise von A. Wählt man auf diesem Kreise einen beliebigen Punkt o'' und zieht durch As eine Parallele A'' zu o'' Aq', so liefern die Strahlen o'' a' und o'' b' auf A'' (A'' fällt im vorliegenden Falle mit A2 zusammen) ebenfalls die wahre Länge von  . Würde man
. Würde man  in eine beliebige Anzahl gleicher oder in einem bestimmten Verhältnisse zueinander stehender Teile teilen, so lieferten die Verbindungslinien dieser Teilungspunkte mit o0 auf A' die Zentralprojektionen der Teilungspunkte. – Eine unbegrenzte Ebene wird in zentraler Projektion bestimmt durch die Zentralprojektionen von zweien ihrer Geraden; als solche Gerade wählt man zweckmäßig die Schnittlinie S (Fig. 21) der Ebene mit der Bildebene, d.h. ihre Spur und die Schnittlinie Q' einer Parallelebene zu ihr durch das Zentrum. Letztere Linie Q' heißt die Flucht der Ebene. Eine Ebene wird also dargestellt durch Spur und Flucht. Steht die Ebene senkrecht zur Bildebene, so geht ihre Flucht durch den Hauptpunkt. Eine beliebige Gerade A der Ebene hat ihre Spur As in der Spur S und ihre Flucht Aq' in der Flucht Q' der Ebene. Ist durch S Q' (s. Fig. 22) eine beliebige Ebene zentralprojektivisch dargestellt, so läßt sich in einfacher Weise sowohl ihr Neigungswinkel mit der Bildebene bestimmen als auch die Ebene selbst mit allen in ihr liegenden Punkten und Linien in die Bildebene umlegen, wodurch sich die wahre gegenseitige Lage dieser Elemente gegeneinander ermitteln läßt. Fällt man nämlich durch o2 die Senkrechte o2 q0' zu Q', macht o2 o' parallel zu Q' und gleich der Distanz, so ist in dem rechtwinkligen Dreieck o2 q0' o' der Winkel W gleich dem Neigungswinkel der Ebene S Q'[261] zur Bildebene. Legt man die Parallelebene Q' in die Bildebene um, so kommt das Zentrum nach o0 und die Verbindungslinien von o0 mit den Punkten der Flucht Q' geben die umgelegten Parallelstrahlen zu den Geraden der Ebene. Für die Gerade A' ist also o0 Aq' der umgelegte Parallelstrahl, und es wird die Umlegung A0 der Geraden selbst parallel zu o0 Aq' durch As zu ziehen sein. So ist auch B0 die Umlegung von B, ebenso C0 jene von C u.s.w., entsprechend ist durch das Dreieck a0 b0 c0 die wahre Gestalt des Dreiecks a b c, dessen zentrale Projektion durch a' b' c' dargestellt ist, gegeben.
in eine beliebige Anzahl gleicher oder in einem bestimmten Verhältnisse zueinander stehender Teile teilen, so lieferten die Verbindungslinien dieser Teilungspunkte mit o0 auf A' die Zentralprojektionen der Teilungspunkte. – Eine unbegrenzte Ebene wird in zentraler Projektion bestimmt durch die Zentralprojektionen von zweien ihrer Geraden; als solche Gerade wählt man zweckmäßig die Schnittlinie S (Fig. 21) der Ebene mit der Bildebene, d.h. ihre Spur und die Schnittlinie Q' einer Parallelebene zu ihr durch das Zentrum. Letztere Linie Q' heißt die Flucht der Ebene. Eine Ebene wird also dargestellt durch Spur und Flucht. Steht die Ebene senkrecht zur Bildebene, so geht ihre Flucht durch den Hauptpunkt. Eine beliebige Gerade A der Ebene hat ihre Spur As in der Spur S und ihre Flucht Aq' in der Flucht Q' der Ebene. Ist durch S Q' (s. Fig. 22) eine beliebige Ebene zentralprojektivisch dargestellt, so läßt sich in einfacher Weise sowohl ihr Neigungswinkel mit der Bildebene bestimmen als auch die Ebene selbst mit allen in ihr liegenden Punkten und Linien in die Bildebene umlegen, wodurch sich die wahre gegenseitige Lage dieser Elemente gegeneinander ermitteln läßt. Fällt man nämlich durch o2 die Senkrechte o2 q0' zu Q', macht o2 o' parallel zu Q' und gleich der Distanz, so ist in dem rechtwinkligen Dreieck o2 q0' o' der Winkel W gleich dem Neigungswinkel der Ebene S Q'[261] zur Bildebene. Legt man die Parallelebene Q' in die Bildebene um, so kommt das Zentrum nach o0 und die Verbindungslinien von o0 mit den Punkten der Flucht Q' geben die umgelegten Parallelstrahlen zu den Geraden der Ebene. Für die Gerade A' ist also o0 Aq' der umgelegte Parallelstrahl, und es wird die Umlegung A0 der Geraden selbst parallel zu o0 Aq' durch As zu ziehen sein. So ist auch B0 die Umlegung von B, ebenso C0 jene von C u.s.w., entsprechend ist durch das Dreieck a0 b0 c0 die wahre Gestalt des Dreiecks a b c, dessen zentrale Projektion durch a' b' c' dargestellt ist, gegeben.
Ein ebenes Gebilde und seine Zentralprojektion, desgleichen die Umlegung des Gebildes und die Zentralprojektion stehen in einem bestimmten geometrischen Zusammenhange, der dadurch charakterisiert ist, daß den Punkten des einen Gebildes Punkte des andern so zugeteilt lind, daß die Verbindungslinien entsprechender Punkte durch einen festen Punkt hindurchgehen, während den Geraden des einen Gebildes Gerade des andern so entsprechen, daß entsprechende Gerade auf einer festen Linie S (Fig. 22) sich schneiden. Diesen Zusammenhang nennt man zentrische Kollineation (s.d.); der feste Punkt, durch welchen die Verbindungslinien entsprechen der Punkte hindurchgehen, heißt das Kollineationszentrum, die Gerade, auf welcher sich entsprechende Gerade schneiden, heißt die Kollineationsachse. Außer der Kollineationsachse S sind noch zwei weitere Achsen Q' und R0, beide parallel zu S, vorhanden; sie heißen die Gegenachsen der Kollineation und haben die Eigenschaft, daß die auf ihnen liegenden Punkte den unendlich fernen Punkten des andern Gebildes entsprechen. In Fig. 6 sind die Figuren a' b' c' und a0 b0 c0 zentrisch kollineare Figuren mit S als Kollineationsachse, o0 als Kollineationszentrum und den Achsen Q' und R0 als Gegenachsen. Entsprechende Punkte sind also a' a0, b' b0 u.s.w., entsprechende Gerade a' b', a0 b0, a' c', a0 c0 u.s.w. Sämtliche Normalen zu einer Ebene sind zueinander parallel, sie besitzen somit in zentraler Projektion einen gemeinsamen Fluchtpunkt, den Normalenfluchtpunkt der Ebene; er liegt (s. Fig. 23) auf der Normalen durch den Hauptpunkt zur Flucht der Ebene und außerdem auf der Normalen durch o' zu q0' o'. Ist der Normalenfluchtpunkt Nq' einer Ebene bestimmt, so ist damit auch das Ziehen von Normalen zur Ebene durch gegebene Punkte ermöglicht. Die Normale durch a' (s. Fig. 23) zur Ebene S Q' geht durch Nq', ihre Spur Ns liegt auf der Parallelen durch a2 zu Nq o2.
Im vorstehenden sind die Mittel angegeben zur Lösung aller Aufgaben der Projektionslehre mittels zentraler Projektion. Zur Herstellung der zentralen Projektion eines Körpers bedient man sich im allgemeinen stets des Verfahrens, daß man durch jeden seiner Punkte zwei gerade Linien zieht und deren zentrale Projektionen bestimmt, der Schnittpunkt der letzteren gibt die Zentralprojektion des Punktes. – Die Konstruktionen der Zentralprojektion und der Zentralperspektive weichen im wesentlichen nicht voneinander ab; es soll deshalb im folgenden nur von den letzteren gesprochen werden.
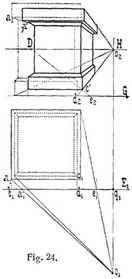
Bei der Zentralperspektive besteht in der Regel die Aufgabe darin, einen durch Grund- und Aufriß gegebenen Gegenstand für eine bestimmte Ebene als Bildebene und für einen Punkt vor derselben als Auge bezw. Zentrum zentralperspektivisch darzustellen. Benutzt man nun als Hilfsgeraden durch jeden Punkt des Gegenstandes einmal die Senkrechte zur Bildebene und außerdem den Strahl nach dem Zentrum, so bezeichnet man diese Methode als Durchschnittsmethode. Man kann aber auch anstatt der Strahlen nach dem Zentrum durch jeden Punkt eine zur Bildebene unter 45° geneigte Gerade, die außerdem noch horizontal gewählt werden kann, benutzen und erhält dann die Distanzpunktsmethode. Kommen endlich an einem darzustellenden Objekte ein oder mehrere Systeme von parallelen Geraden vor, wie dies z.B. an jedem Gebäude der Fall ist, so wird man sich die Zentralprojektionen dieser Parallelen verschaffen und hiernach die Zentralprojektionen der einzelnen Punkte des Körpers erhalten. Die hierauf sich gründende Methode heißt die Fluchtpunktsmethode. – Bei den Darstellungen in Zentralperspektive bezeichnet man die Spur G (vgl. Fig. 24) der Horizontalebene als Grundlinie, die Flucht H als Horizont, der Hauptpunkt heißt Augpunkt. In Fig. 24 ist ein Körper durch Grund- und Aufriß dargestellt. E1 bezeichnet den Grundriß der Bildebene, o1 und o2 sind Grund- und Aufriß des Auges. Der Körper befindet sich in paralleler Stellung zur Bildebene; die Perspektive a' des Punktes a ist mittels der Durchschnittsmethode ermittelt[262] worden, der Strahl nach dem Zentrum durch a liefert im Grundriß den Punkt a1', dem im Aufriß die Perspektive a' entspricht. Mittels der Distanzpunktsmethode ist der Punkt c' bestimmt worden. Durch c1 sind die beiden Geraden c1, d1 und c1 e1 erstere senkrecht, letztere unter 45° zur Bildebene gezogen worden; ihnen entsprechen die Perspektiven d2 o2 und e2 D (D = Distanzpunkt), die sich in c' schneiden.
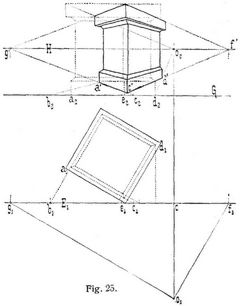
Der in Fig. 25 dargestellte Körper zeigt die Konstruktion mittels der Fluchtpunktsmethode. Es sind hier für die auftretenden Horizontalen die Fluchtpunkte f' und g' ermittelt worden. Durch jeden Punkt des Körpers, z.B. a, gehen zwei horizontale Kanten des Körpers, deren Perspektiven man mittels der Durchschnittspunkte b und c dieser Kanten mit der Bildebene und der Fluchtpunkte f' und g' ermittelt. Will man nur eine der horizontalen Körperkanten für einen Punkt des Körpers benutzen, so kann man als zweite Gerade etwa eine Senkrechte zur Bildebene verwenden, wie dies z.B. für den Punkt d geschehen ist.
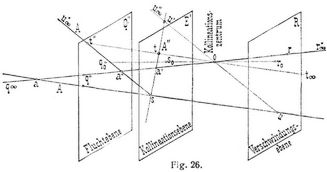
Reliefprojektion. Statt der ebenen Zentralprojektion eines Gegenstandes kann man sich auch eine räumliche Abbildung desselben verschaffen, wenn man auf jedem das Zentrum enthaltenden Projektionsstrahl einen Punkt so wählt, daß derselbe mit dem Zentrum, dem Raumpunkte und seiner Zentralprojektion ein Doppelverhältnis von konstantem Werte = Δ bildet. Diese so bestimmten Punkte erfüllen dann ein zweites, räumliches Gebilde, welches man als die zentrisch-kollineare Verwandte des ersteren bezeichnet. Ist das Original ein Körper, so ist im allgemeinen auch die zentrisch-kollineare Verwandte desselben ein Körper, den man als das Modell oder als das Relief des ersten Körpers bezeichnen kann. Die Projektion dieses Reliefs auf die Projektionsebene heißt die Reliefprojektion des Körpers. – Aus vorstehender Definition folgt, daß einem Punkt wieder ein Punkt, einer das Zentrum nicht enthaltenden Geraden oder Ebene wieder eine Gerade oder Ebene entspricht. Die in der Projektionsebene liegenden Gebilde entsprechen sich selbst. Der vorstehend charakterisierte Zusammenhang zwischen den Punkten, Geraden und Ebenen des Raumes bezeichnet man als räumliche Zentralkollineation und nennt die Ebene der sich selbst entsprechenden Gebilde die Kollineationsebene, das Zentrum das Kollineationszentrum. Da die unendlich fernen Punkte des Raumes in einer Ebene liegen, so entsprechen ihnen wieder die Punkte einer Ebene, welche parallel zur Kollineationsebene gerichtet ist. Gehören die unendlich fernen Punkte dem Originalsysteme an, so liegen die ihnen entsprechenden Punkte im Reliefsystem in einer Ebene Q'' (Fluchtebene oder Gegenebene, Fig. 26); gehören sie dem Reliefsystem an, so liegen die Originalpunkte in einer zur Kollineationsebene E' parallelen Ebene R (Verschwindungsebene oder zweite Gegenebene). Für jeden das Kollineationszentrum o enthaltenden Strahl, auf welchem ein Paar entsprechender Punkte a a'' liegen, finden die folgenden Doppelverhältnisgleichheiten statt: (a a'', o a') = (q q'', o a') = (r r'', o a') = Δ. Hieraus folgt die Beziehung:
woraus sich ergibt, daß die Ebene Q'' gerade so weit von der Kollineationsebene E absteht, wie die Ebene R vom Zentrum o. Das Doppelverhältnis Δ, das dem einfachen Teilverhältnis gleich ist, nach welchem die Fluchtebene Q'' bezw. die Verschwindungsebene R den Abstand zwischen Kollineationsebene E' und Zentrum o teilt, heißt das charakteristische Doppelverhältnis oder die Charakteristik der räumlichen Zentralkollineation. – Jede das Zentrum enthaltende Ebene schneidet auch zwei zentrisch-kollineare ebene Systeme mit der gleichen Charakteristik Δ aus, für welche die Schnittlinien der Ebene mit der Kollineations- bezw. mit der Gegenebene Kollineationsachse und Gegenachse ergeben. Eine das Zentrum nicht enthaltende Ebene liefert durch ihren Schnitt mit den räumlichen Systemen gleichfalls zwei zentrisch-kollineare Systeme, für welche die Achsen der Kollineation die Schnittlinie der Ebene mit der Kollineationsebene bezw. den Gegenebenen sind. Doch ist hierbei der Wert der Charakteristik der ebenen Kollineation verschieden von dem Charakteristikwert der räumlichen Kollineation.
Die zentrische Kollineation räumlicher Systeme hat insbesondere für die Technik eine Bedeutung, wenn das Kollineationszentrum und der Körper, dessen zentrisch-kollineare Verwandte bestimmt werden soll, auf verschiedenen Seiten der Kollineationsebene liegen. Denkt man sich dann das Zentrum ersetzt durch das Auge des Beschauers, so erblickt dasselbe in der zentrisch-kollinearen Verwandten des Körpers eine räumliche Abbildung desselben, also gewissermaßen ein Modell oder ein Relief des Körpers. Diesen besonderen Fall der räumlichen Zentralkollineation bezeichnet man als Reliefperspektive, im Gegensatz zu der gewöhnlichen Linearperspektive, bei welcher ein Körper zentral in die Bildebene projiziert wird.
Bei der Reliefperspektive entspricht dem ganzen, hinter der Bildebene liegenden Räume, Originalraum, der zwischen Bild- und Fluchtebene gelegene Raum als Bildraum. Die Darstellungen der Reliefperspektive erfolgen durch Grund- und Aufriß. – So ist in Fig. 27 das[263] Relief eines Würfels im Grund- und Aufriß wiedergegeben. Die Charakteristik
beträgt ein Drittel. Die Kollineationsebene fällt mit der vertikalen Projektionsebene zusammen. – Der Reliefpunkt eines Punktes a bestimmt sich im Grundriß mittels der beiden Geraden a1 o1 und a1', q0; der Aufriß a2'' liegt auf a2 o2 und auf der Projizierenden durch a1''.
Literatur: Bezüglich der eigentlichen Zentralprojektion s. Literatur über darstellende Geometrie. Werke über Zentralperspektive sind: Schreiber, G., Malerische Perspektive, Karlsruhe 1854; Tilscher, System der Perspektive, Prag 1867; Peschka und Koulny, Freie Perspektive, Hannover 1868; Hauck, G., Die subjektive Perspektive, Stuttgart 1879; für die Reliefperspektive sind bemerkenswert: Poudra, Traité de perspective relief, Paris 1862; Staudigel, Grundzüge der Reliefperspektive, Wien 1868; Burmester, Grundzüge der Reliefperspektive, Leipzig 1883; Berger, G., Die Lehre der Perspektive, Leipzig 1898; Conz, G., Lehrbuch der Perspektive, Stuttgart 1902; Delabar, Die Polar- und Parallelperspektive, Freiburg 1905; Dietzel, Die Elemente der Perspektive, Leipzig 1902; Vonderlinn, Perspektive, Leipzig 1908; Seeberger, G., Prinzipien der Perspektive und deren Anwendung, 8. Aufl., München 1905; Weishaupt, H., Axonometrie und Perspektive, Leipzig 1903; Döhlemann, K., Projektile Geometrie, Leipzig 1903; Geyger, Lehrbuch der darstellenden Geometrie, Leipzig 1906; Müller, R., Leitfaden der darstellenden Geometrie, Braunschweig 1903, Schlotke, Perspektive, 2. Aufl., Leipzig 1902; Haußner, Darstellende Geometrie, 3 Bde., Leipzig 1902.
Vonderlinn.






Buchempfehlung
Holz, Arno
Die Familie Selicke

Das bahnbrechende Stück für das naturalistische Drama soll den Zuschauer »in ein Stück Leben wie durch ein Fenster« blicken lassen. Arno Holz, der »die Familie Selicke« 1889 gemeinsam mit seinem Freund Johannes Schlaf geschrieben hat, beschreibt konsequent naturalistisch, durchgehend im Dialekt der Nordberliner Arbeiterviertel, der Holz aus eigener Erfahrung sehr vertraut ist, einen Weihnachtsabend der 1890er Jahre im kleinbürgerlich-proletarischen Milieu.
58 Seiten, 4.80 Euro
Im Buch blättern
Ansehen bei Amazon
Buchempfehlung
Geschichten aus dem Sturm und Drang II. Sechs weitere Erzählungen

Zwischen 1765 und 1785 geht ein Ruck durch die deutsche Literatur. Sehr junge Autoren lehnen sich auf gegen den belehrenden Charakter der - die damalige Geisteskultur beherrschenden - Aufklärung. Mit Fantasie und Gemütskraft stürmen und drängen sie gegen die Moralvorstellungen des Feudalsystems, setzen Gefühl vor Verstand und fordern die Selbstständigkeit des Originalgenies. Für den zweiten Band hat Michael Holzinger sechs weitere bewegende Erzählungen des Sturm und Drang ausgewählt.
- Johann Karl Wezel Kakerlak oder die Geschichte eines Rosenkreuzers
- Gottfried August Bürger Münchhausen
- Friedrich Schiller Der Verbrecher aus verlorener Ehre
- Karl Philipp Moritz Andreas Hartknopfs Predigerjahre
- Jakob Michael Reinhold Lenz Der Waldbruder
- Friedrich Maximilian Klinger Geschichte eines Teutschen der neusten Zeit
424 Seiten, 19.80 Euro
Ansehen bei Amazon
- ZenoServer 4.030.014
- Nutzungsbedingungen
- Datenschutzerklärung
- Impressum