Beschleunigungszentrum
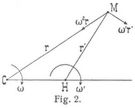
[718] Beschleunigungszentrum. Das Momentanzentrum C einer ebenen Bewegung, entsprechend der Zeit t (Fig. 1), hat die Geschwindigkeit Null und ist[718] daher Mittelpunkt der Geschwindigkeiten v der Systempunkte M. Auf konzentrischen Kreisen um dasselbe ist die Geschwindigkeit nach Größe, auf den Strahlen desselben der Richtung nach dieselbe, und es wächst die Geschwindigkeit eines Punktes proportional mit seinem Abstande r, so daß sie ist: v = ωr, wenn ω die Winkelgeschwindigkeit um das Momentanzentrum ist (s. Momentanzentrum). In ähnlicher Weise gibt es im ebenen, in ebener Bewegung begriffenen Punktsystem einen Punkt G, dessen Beschleunigung Null ist und um den sich die Beschleunigungen der Systempunkte regelmäßig gruppieren. Er ist das Beschleunigungszentrum oder der Mittelpunkt der Beschleunigungen.
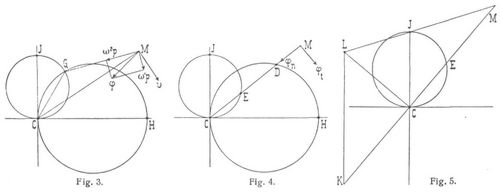
Durch zwei aufeinander folgende Lagen des Systems sind die Richtungen der Tangenten und Normalen der Bahnen der Systempunkte bestimmt, und wenn die Geschwindigkeit v irgend eines Systempunktes in Abstand r vom Momentanzentrum gegeben ist, so folgt die Winkelgeschwindigkeit ω um das Momentanzentrum aus der Gleichung ν = rω und sind dadurch die Geschwindigkeiten aller Punkte bekannt. Die Winkelgeschwindigkeit ω repräsentiert daher den Geschwindigkeitszustand des Systems. Durch drei aufeinander folgende Lagen ∑1, ∑2, ∑3 des beweglichen Systems ∑ ergibt sich die Krümmung der Bahnen der Systempunkte und mit Hilfe von ω, dω/dt und u der Beschleunigungszustand des Systems. Der Differentialquotient dω' = ω' der Winkelgeschwindigkeit heißt die Winkelbeschleunigung und ein Punkt H auf der Tangente der Kurve C der Momentanzentra im Zentrum C im Abstande CH = ωu : dω/dt auf der Seite, nach welcher der Sinn der Wechselgeschwindigkeit u hinweist, gelegen, der Mittelpunkt der Winkelbeschleunigung (Fig. 4). Ein Systempunkt M im Abstand r von C und dem Abstande r' von H besitzt zwei Komponenten der Beschleunigung: eine gleich w2r nach C hin gerichtet, und eine zweite r'ω', senkrecht zu r. Auf dem Kreise, dessen Durchmesser CH ist, gibt es einen Punkt G, dessen Beschleunigungskomponenten sich tilgen und dessen Beschleunigung also Null ist. Er heißt das Beschleunigungszentrum (Fig. 5). Er liegt zugleich auf einem zweiten Kreise vom Durchmesser CJ = u : ω, der die Kurve (C) in C berührt und auf die Seite der Tangente CH fällt, nach der die Bewegung des Systems nicht erfolgt. Um das Beschleunigungszentrum G gruppieren sich die Beschleunigungen der Systempunkte symmetrisch. Ist nämlich p der Abstand MG eines Punktes M von diesem Zentrum, so kann die Beschleunigung von M in zwei Komponenten zerfällt werden, von denen die eine, ω2p, nach G gerichtet ist, während die andre, ω'p, senkrecht zu p ist. Die Beschleunigung φ selbst ist daher
und bildet mit dem Strahle p den Winkel λ, für den tg λ = ω' : ω2 ist. Demnach sind die Beschleunigungen aller Systempunkte gleich geneigt gegen die Strahlen, die sie mit dem Beschleunigungszentrum verbinden; sie sind proportional dem Abstande p der Punkte von diesem Zentrum und wechseln den Sinn beim Uebergang von der einen Seite des Strahles p auf die andre. Durch die beiden Zentren C und G, das Momentanzentrum und das Beschleunigungszentrum, ist der momentane Bewegungszustand durch die Winkelgeschwindigkeit ω und die Winkelbeschleunigung ω' vollständig bestimmt. Sind wie bisher r und p die Abstände eines Systempunktes M von diesen Zentren, so ist υ = rω die Geschwindigkeit von M senkrecht zu r und die Beschleunigung
unter dem Winkel λ gegen p geneigt, dessen Tangente ω': ω2 ist.
Die Beschleunigung φ kann zerlegt werden in die Tangentialbeschleunigung φt = dυ/dt von der Richtung der Tangente der Bahn des Punktes M (Fig. 6) und die Normalkomponente φn = υ2 : ρ von der Richtung der Bahnnormalen, wenn ρ den Krümmungshalbmesser der Bahn bedeutet. Für die Punkte des Kreises über CH als Durchmesser ist φt = 0; für die Punkte des Kreises über CJ als Durchmesser φn = 0. Sind D, E die Schnittpunkte von r mit diesen Kreisen[719] und CD = r0, CE = r1, so kann man φt und φn unter der Form φt = ω'(r – r0), φη = ω2(r – r1) darstellen. Auf diesen Kreisen wechseln die Tangential- und Normalkomponente der Beschleunigung den Sinn. Diese beiden, von Bresse zuerst bemerkten Kreise führen die Namen des Tangentialkreises und des Wendekreises. Der erstere ist der Ort aller Punkte des Systems, deren Geschwindigkeit momentan stationär ist (dυ/dt = 0), der letztere der Ort der Punkte, die momentan die Stellen ihrer Bahn, in denen der Krümmungshalbmesser p = ∞ wird, die also im allgemeinen Wendepunkte sind, passieren (v2/ρ = 0).
Mit Hilfe des Wendekreises ergeben sich die Krümmungshalbmesser ρ der Bahnen aller Systempunkte M. Die Verbindungslinie MC des Punktes M mit dem Momentanzentrum enthält als die Normale der Bahn in M den Krümmungsmittelpunkt K (Fig. 7), und es ist ME ∙ ρ = r2, wenn MC = r, MK = ρ. Dies führt leicht zu folgender Konstruktion von K. Man verbinde M mit J (dem Wendepol) und errichte im Momentanzentrum C auf der Normalen MC eine Senkrechte; durch den Schnittpunkt L derselben mit MJ ziehe man eine Gerade parallel CJ; sie schneidet die Normale im Krümmungsmittelpunkte K.
Literatur: Chasles, Propriétés géométriques relatives an mouvement infiniment petit d'un corps solide dans l'espace (Comptes rendus de l'Acad. des sciences de Paris, t. 16, S. 1420–1432, année 1843); Propriétés relatives au déplacement fini quelconque, dans l'espace d'une figure de forme invariable (Comptes rendus, t. 51, 52, 1860 und 1861); Théorèmes généraux sur le déplacement d'une figure plane dans son plan (Comptes rendus, t. 80, S. 346, 1875); Théorèmes relatives au déplacement d'une figure plane dont deux points glissent sur deux courbes d'ordre et de classe quelconque (Comptes rendus, t. 82, 1876); Aronhold, Kinematische Mitteilungen (Verhandlungen des Vereins zur Beförderung des Gewerbefleißes in Preußen, Berlin 1872); Burmester, Lehrbuch der Kinematik, Leipzig 1888, Bd. 1; Schell, Theorie der Bewegung und der Kräfte, Leipzig 1879, Bd. 1, S. 218–245 und S. 441–474.
Finsterwalder.

Buchempfehlung
Grabbe, Christian Dietrich
Hannibal

Grabbe zeigt Hannibal nicht als großen Helden, der im sinnhaften Verlauf der Geschichte eine höhere Bestimmung erfüllt, sondern als einfachen Menschen, der Gegenstand der Geschehnisse ist und ihnen schließlich zum Opfer fällt. »Der Dichter ist vorzugsweise verpflichtet, den wahren Geist der Geschichte zu enträtseln. Solange er diesen nicht verletzt, kommt es bei ihm auf eine wörtliche historische Treue nicht an.« C.D.G.
68 Seiten, 4.80 Euro
Im Buch blättern
Ansehen bei Amazon
Buchempfehlung
Große Erzählungen der Hochromantik

Zwischen 1804 und 1815 ist Heidelberg das intellektuelle Zentrum einer Bewegung, die sich von dort aus in der Welt verbreitet. Individuelles Erleben von Idylle und Harmonie, die Innerlichkeit der Seele sind die zentralen Themen der Hochromantik als Gegenbewegung zur von der Antike inspirierten Klassik und der vernunftgetriebenen Aufklärung. Acht der ganz großen Erzählungen der Hochromantik hat Michael Holzinger für diese Leseausgabe zusammengestellt.
- Adelbert von Chamisso Adelberts Fabel
- Jean Paul Des Feldpredigers Schmelzle Reise nach Flätz
- Clemens Brentano Aus der Chronika eines fahrenden Schülers
- Friedrich de la Motte Fouqué Undine
- Ludwig Achim von Arnim Isabella von Ägypten
- Adelbert von Chamisso Peter Schlemihls wundersame Geschichte
- E. T. A. Hoffmann Der Sandmann
- E. T. A. Hoffmann Der goldne Topf
390 Seiten, 19.80 Euro
Ansehen bei Amazon
- ZenoServer 4.030.014
- Nutzungsbedingungen
- Datenschutzerklärung
- Impressum