Integraph
[203] Integraph, ein Instrument, welches zur mechanischen Ausführung der Integrationen dient, zu einer gezeichneten Kurve y = f(x) die zugehörige Integralkurve Y = ∫f (x, y)d x + C zeichnet und den Inhalt gezeichneter Flächenumrisse mißt.
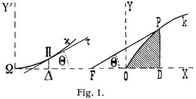
Um das kinematische Prinzip abzuleiten, auf welchem der Integraph beruht, nehmen wir an, es sei in Fig. 1 in bezug auf die rechtwinkligen Koordinatenachsen O X, O Y die durch eine Gleichung y = f(x) gegebene Kurve k gezeichnet; ferner sei in bezug auf die rechtwinkligen Koordinatenachsen Ω X, Ω Y' für eine angenommene Längeneinheit F D die zugehörige Integralkurve κ, deren Gleichung, weil wir jene Konstante C = o annehmen, Y = ∫f (x, y)d x ist. Die Abszisse O D, die Ordinate D P und das Stück O P der vom Koordinatenanfang O ausgehenden Kurve k begrenzen ein Flächenstück O D P. Die zu der Abszisse Ω Δ = O D = x gehörende Ordinate Δ Π = Y der Integralkurve κ, die von dem Koordinatenanfang Ω ausgeht, stellt den Inhalt dieses Flächenstücks im Quadratmaß der angenommenen Längeneinheit F D dar. Bezeichnen wir den Winkel D F P mit Θ, und differentiieren wir die Gleichung der Integralkurve, so folgt d Y/d x = f(x) = y = D P = tg Θ. Demnach bildet die Tangente Π τ in Punkt Π an der Integralkurve κ mit der Abszissenaxe Ω X den Winkel Θ, und es ist diese Tangente parallel F P.
Ein Integraph, der durch einen Schreibstift im Punkt Π die Integralkurve κ beschreiben soll, wenn ein Stift im Punkt P auf der Kurve k geführt wird, muß so eingerichtet sein, daß bei der Bewegung des Punktes P auf der Kurve k der Abstand D Δ der beiden auf der Abszissenachse senkrechten Geraden D P, Δ Π sowie die Einheitsstrecke D F konstant bleibt und daß ferner der in der Geraden Δ Π bleibende Punkt Π sich immer in der Richtung bewegt, die parallel zu der veränderlichen Geraden F P ist. In Fig. 2 ist ein Integraph schematisch gezeichnet, durch dessen praktische Ausführung diese Bedingungen erfüllt werden. Ein Rahmen R1 R2 R3 R4 mit den vier geriffelten Walzen w1 w2 w3 w4 bewegt sich als Wagen auf der horizontalen Zeichnungsebene in der Richtung der Abszissenachse O X und trägt den Zapfen F, durch den die angenommene Längeneinheit F D' bestimmt ist; auf der Rahmenseite R1 R3 gleitet eine Hülfe H, die einen Zapfen P' und einen mit einem Führungsstift P versehenen Arm trägt. Eine um den Zapfen F drehbare Schiene s ist mit einem Längsschlitz versehen, in welchem der Zapfen P' gleitet, und auf dieser Schiene s befindet sich eine bewegliche Hülfe h, die zwei gleiche, zur Schiene s senkrechte Arme h α, h β besitzt. Ferner gleitet auf der Rahmenseite R1 R4 eine Hülfe J mit einem Arm J Π, der im Π einen Schreibstift und in Π' eine vertikale Achse trägt. Diese vertikale Achse ist mit einem gleicharmigen Hebel γ Π' δ fest verbunden und trägt unten in einer Zarge die zu γ δ parallele Achse einer scharfrandigen Integrierrolle ρ. Diese Integrierrolle berührt die Zeichnungsebene unter dem Punkt Π'. Es ist γ δ gleich und parallel α β, und jenes Glied α h β ist durch zwei gleich lange parallele Stangen α δ, β γ mit dem gleicharmigen Hebel gelenkig verbunden, so daß α β γ δ ein Gelenkparallelogramm bilden. Wird nun der Stift P auf der gezeichneten Kurve k geführt, so bewegt sich der Wagen in der Richtung O X, die Hülfe H gleitet auf R2 R3, und die Zapfenmitte P' bewegt sich auf einer zu k kongruenten Kurve, die gegen k in der Richtung X O parallel verschoben ist. Demnach bildet die Schiene F s mit O X jenen Winkel Θ, weil die Strecke F D' gleich der Längeneinheit und D' P' = D P = y ist. Durch das Gelenkparallelogramm α β γ δ wird die Achse der Integrierrolle ρ senkrecht zur Schiene F s und die Integrierrolle ρ parallel zu dieser Schiene gestellt. Der Berührungspunkt der scharfrandigen Integrierrolle ρ auf der Zeichnungsebene, resp. der Punkt Π', durchläuft, während der Führungsstift P auf der Kurve k bewegt wird, die entsprechende Integralkurve, und der Schreibstift Π zeichnet die Integralkurve κ, welche gegen die vom Punkte Π' beschriebene in der Richtung X Ω um die Strecke Π' Π parallel verschoben ist; denn die Hülfe J gleitet auf dem bewegten Wagen längs R1 R4 und die Integrierrolle ρ bewegt sich, vermittelst des Gelenkparallelogrammes α β γ δ, in der zu F P' parallelen veränderlichen Richtung. Die Integraphen wurden zuerst von Abdank-Abakanowicz in verschiedenen Gestaltungen angegeben [1].
Bei der von G. Coradi in Zürich ausgeführten praktischen Anordnung des in Fig. 2 schematisch gezeichneten Integraphen ist zur Verminderung der Reibung die Hülse J durch ein[203] auf zwei Rollen in einer Rille längs R1 R4 bewegliches Glied ersetzt; ferner ist R1 R4 mit einer Teilung versehen, auf der die Verschiebung des Gliedes J bezw. der Inhalt einer mit dem Stift P umfahrenen Fläche abgelesen werden kann; der Zapfen F ist auf einer Querleiste, die eine Teilung trägt, verstellbar, um eventuell die Längeneinheit verschieden zu wählen.
Literatur: [1] Abdank-Abakanowicz, Br., Les Integraphes, Paris 1886; ferner »Die Integraphen«, deutsch bearbeitet von E. Bitterli, Leipzig 1889.
Burmester.

- ZenoServer 4.030.014
- Nutzungsbedingungen
- Datenschutzerklärung
- Impressum