Stabilität [1]
[235] Stabilität eines Schiffes kennzeichnet sich durch den Widerstand, welchen das aufrecht schwimmende Schiff einer Neigung entgegensetzt, und durch die Fähigkeit, sich selbst wieder aufzurichten, falls es durch äußere Kräfte in eine geneigte Lage gebracht ist.
Man unterscheidet zwischen Stabilität für die aufrechte Lage bezw. für kleine Neigungswinkel – Anfangsstabilität – und Stabilität für größere Neigungswinkel. Die Anfangsstabilität richtet sich nach der Höhenlage des Metazentrums (s.d.) über dem Deplacementsschwerpunkt bezw. Systemschwerpunkt; für die Stabilität unter größeren Neigungswinkeln kommt als Hauptfaktor die Form des Schiffes hinzu. Eine genügende Anfangsstabilität bringt durchaus nicht immer gute Stabilitätsverhältnisse für größere Neigungen mit sich, während anderseits eine negative Anfangsstabilität bei größeren Neigungswinkeln günstige Verhältnisse geben kann. Der Neigung eines Schiffes durch ein äußeres drehendes Moment wirkt das Stabilitätsmoment zur Aufrichtung des Schiffes entgegen. – Statische Stabilität. Die zur Erzielung der Neigung aufgewendete Arbeit, welche gleich der von dem Widerstand während des Aufrichtens zu leidenden Arbeit ist, bezeichnet man mit »Dynamische Stabilität«. Nach der Richtung der Drehachse unterscheidet man Breitenstabilität um eine wagerechte Längsachse und Längsstabilität um eine wagerechte Querachse. Bezüglich der Anfangsstabilität vgl. Metazentrum (Bd. 6, S. 411).
Als Grundlage für die Stabilitätsberechnungen für größere Neigungen dient die sogenannte Atwoodsche Formel, welche die Volumina der ein- und austauchenden Keilstücke v sowie ihre Schwerpunktslagen γ und γ1 (s. Fig. 2, Bd. 6, S. 412) und die Lage des Systemschwerpunktes berücksichtigt. Stabilitätsmoment = Depl. G N = v · γ γ1 ± Depl. C G sin φ. Ist die Lage von G festgestellt und berechnet man für die verschiedenen Neigungen des Schiffes von 0 bis 90° die ein- und austauchenden Keilstücke nebst ihren Schwerpunktslagen und führt besondere Korrekturen der Stabilitätsmomente gemäß der Differenzen der Keilstücke ein, so erhält man für die einzelnen Neigungen die Größe der Stabilitätsmomente bezw. der Hebelarme derselben. Hierauf basieren die Rechnungsmethoden von Read [10], Barnes [11] und White [14]. Die Franzosen Dargnies [8], Reech [12], Risbec [13] und Daymard [15] nahmen die Konstruktion der metazentrischen Kurve, d.h. die Evolute der Deplacementschwerpunktskurve mit Hilfe der Krümmungsradien als Ausgangspunkt, und die Hebelarme der Stabilität sind die [235] Perpendikel vom Systemschwerpunkt auf die entsprechenden Krümmungsradien der Deplacementschwerpunktskurve. Die Methode von Daymard ermöglicht, für jede beliebige Lage des System- und Deplacementschwerpunktes sowie für jeden Tiefgang und jeden Winkel die Hebelarme der Stabilität graphisch schnell zu ermitteln. Die Benutzung des sogenannten falschen Metazentrums sowie die Konstruktion von sogenannten cross curves unter Benutzung von Amslers Integrator, umfassen die Methoden von Benjamin [19], Elgar [18], Spence [20], Fellow [17], Couwenberg [17], Purvis Kindermann [16], Middendorf [3] u.a. Sie besitzen den Vorteil, daß sie die Stabilitätsmomente für verschiedene Tiefgangslagen auf graphischem Wege ermitteln [6]–[9]. Trägt man die nach vorgehenden Methoden ermittelten Stabilitätsmomente als Ordinaten für die einzelnen Werte der Neigungswinkel als Abszissen auf, so ergeben die Endpunkte eine Kurve, die sogenannte Stabilitätsmomentenkurve, aus deren Verlauf man einen guten Ueberblick über die Stabilität des Schiffes bei den einzelnen Neigungen sowie über die Grenze derselben erhält [1], [3], [5], [6], [8], ABC Fig. 4. Die Form der Stabilitätskurve wird nun einesteils beeinflußt durch die Freibordhöhe und Breite des Schiffes, andernteils durch die Lage des Systemschwerpunkts. Durch größere Breite und größeren Freibord wird die Kurve im Anfang steiler.
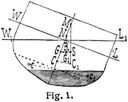
Eine Verschiebung des Systemschwerpunktes findet auch statt, wenn bewegliche Ladung an Bord ist, welche bei längerer Neigung des Schiffes, wie z.B. durch den Winddruck, nach Lee überschießen kann. Ist nach Fig. 1 der Schwerpunkt des Keilstücks der beweglichen Ladung; von der Größe w von c nach c1 verschoben, so ist entsprechend den Formeln in Bd. 6, S. 412, G N = G G1 : 2 sin φ/2 = w · c c1 : 2 sin φ/2 Depl.
Depl., worin
das Trägheitsmoment der freien Oberfläche der beweglichen Ladung ist. Der anfängliche Hebelarm der Stabilität GS = GM sin φ wird daher um den Hebelarm GR = GN sin φ verkürzt, und dies entspricht einer Verkleinerung der metazentrischen Höhe um G N.
Nimmt man in der Längsschiffsebene ein wasserdichtes Längsschott an, so erfolgt das Ueberschießen der Ladung nach Fig. 2. Es wird alsdann
Depl. = 1/4 · 2/3 ∫ y13 dx : Depl., d.h. um 1/4 kleiner als GN; bei Einschaltung von n – 1 Längsschotten wird G Nn um n2 kleiner, so daß die metazentrische Höhe bezw. der Hebelarm des aufrichtenden Momentes erheblich weniger verkleinert wird [2], [3], [5], [6], [8], [9]. Der Einbau von Längsschotten spielt im besonderen bei den Petroleumtankdampfern, sowie bei den Schwimmdocks eine wichtige Rolle, desgleichen auch für Schiffe mit Getreideladungen. Auch ist es hiernach erklärlich, daß Schiffe bei größeren Havarien, wodurch einzelne Räume überflutet werden, wegen des Ueberschießens des Wassers erheblich an Stabilität verlieren und demnach meist vor dem Sinken kentern. Man muß daher, im besonderen bei Kriegsschiffen, darauf bedacht sein, eine größere Zahl von Schlingerschotten einzubauen, um dieselben bei Beschädigungen durch den Torpedo oder die Ramme stabil zu erhalten. Als bewegliche Ladung gelten auch Gewichte, welche pendelnd aufgehängt sind – Schwimmkran mit im Krantakel hängender Last. Für die Berechnung der Stabilität muß man sich die pendelnde Last im Aufhängepunkt angebracht denken und hieraus die Verschiebung. von G berechnen [3].
Die dynamische Stabilität stellt die mechanische Arbeit dar, welche erforderlich ist, um das Schiff um einen bestimmten Neigungswinkel zu krängen. Dieselbe ist nach der Moseleyschen Formel: Dynamische Stabilität = (g x + g1 x) v ± Dept. GC (1 – cos φ); Fig. 3. Man kann die Größe der dynamischen Stabilität auch bestimmen durch einfache Integration der Stabilitätsmomentenkurve nach der Formel: Dynamische Stabilität = Depl.
Eine praktische Verwendung findet die dynamische Stabilität bei Ermittlung der Neigung des Schiffes unter Einwirkung eines plötzlichen Windstoßes auf die Segel. Hierbei kann man annehmen, daß die ganze Arbeitsleistung des Windes auf Neigung des Schiffes wirkt, da das Schiff nicht Zeit genug erhält, eine größere Geschwindigkeit aufzunehmen, bis die dynamische Stabilität die dem Schiff mitgeteilte lebendige Kraft absorbiert hat. Ist in Fig. 4 ABC die Kurve der Stabilitätsmomente, stellt also die Fläche ABCA die Menge an Arbeit, welche erforderlich ist, das Schiff zum Kentern zu bringen, dar, und ist A D in aufrechter Lage des Schiffes das Segelmoment, so wird letzteres bei den verschiedenen Neigungswinkeln im Verhältnis von cos2 φ annäherungsweise vermindert. DEG stellt dementsprechend die Kurve der Segelmomente dar. Dieselbe schneidet die Stabilitätskurve in E, d.h. das Schiff würde sich bei stetiger Brise um 15° neigen. Bei einem plötzlichen Windstoß erhält jedoch das Schiff eine lebendige Kraft, deren Arbeit durch die Kurvenfläche ADEF dargestellt ist. Da bei 15° Neigung dieser Arbeit[236] nur eine dynamische Stabilität gleich der Fläche A E F entgegenwirkt, so ist die Arbeit, welche durch die Fläche ADE dargestellt ist, noch nicht ausgeglichen und wirkt auf weiteres Neigen, bis ADE = EGK ist, d.h. das Schiff legt sich bis zu 30° über. Da für geringe Neigung die Stabilitätskurve fast eine Gerade ist, so kann man allgemein annehmen, daß das Schiff durch einen Windstoß um den doppelten Winkel neigt als bei stetiger Brise. Würde das Segelmoment durch einen stärkeren Windstoß von AD auf AJ erhöht, so müßte das Schiff kentern, da die Fläche HBC kleiner als AJH ist. Befindet sich das Schiff außerdem in Schwingungen, so wird die Neigung, wenn der Windstoß im Augenblick der größten Schlingerbewegung nach Lee eintritt, sich noch über den Winkel ausdehnen, welchen das Schiff unter der Wirkung der Wellen und eines stetigen Windes allein annehmen würde. Man muß daher Bedacht nehmen, bei vollgetakelten Schiffen die Stabilitätsgrenze bis zu 70–80° Neigung auszudehnen, um einem Kentern bei Windstößen vorzubeugen [3]–[6], [8].
Literatur: [1] Lutschaunig, Theorie des Schiffes, Triest 1879. – [2] Neudeck, Leitfaden für den Unterricht im Schiffbau, Kiel 1908. – [3] Krieger, Johows Hilfsbuch für den Schiffbau, Berlin 1902. – [4] Hütte, Ingenieurs-Taschenbuch, Berlin 1908. – [5] White, A Manual of Naval Architecture, London 1900. – [6] Schmidt, A., Die Stabilität von Schiffen, Berlin 1892. – [7] Guyon, Théorie du navire, Paris 1894. – [8] Reed, The stability of ships, London 1885. – [9] Pollard und Dudebout, Theorie de navire, Paris 1890. – [10] Read, On an improved method of calculating the hydrostatic stability of ships, Transactions of the Inst, of Naval Arch., London 1861. – [11] Barnes, On a new method of calculating the statical and dynamical stabilities of a ship, Transactions of the Inst, of Naval Arch., London 1861. – [12] Reech, F., und Jordan, C., Donner une théorie rigoureuse et complète de la stabilité de l'équilibre des corps flottants, Paris 1864. – [13] Risbec, P., Note an sujet du calcul des coordonnées des centres de carène et du trace des développées métacentriques, Paris 1870. – [14] White, H.W., und John, W., On the calculation of the stability of ships and some matters of interest connected therewith, Transactions of the Inst. of Naval Arch., London 1871. – [15] Daymard, V., Mémoire sur de nouvelles courbes servant à représenter et à mesurer la stabilité statique des navires sous toutes les inclinations possibles, Paris 1883. – [16] Purvis, E.P. und Kindermann, B., On approximation to curves of stability from data for known ships, Transactions of the Inst. of Eng. and Shipbuilders, London 1883. – [17] Denny, W., On cross-curves of stability, their uses and a method of constructing them, Transactions of the Inst. of Naval Arch., London 1884. – [18] Elgar, F., The uses of stability calculations in regulating the loading of steamers, Transactions of the Inst. of Naval Arch., London 1884. – [19] Benjamin, L., Contributions to the solution of the problem of stability, Transactions of the Inst. of Naval Arch., London 1884. – [20] Spence, J.C., The graphic calculation of the data depending on the form of ships required for determining their stability, Transactions of the Inst. of Naval Arch., London 1884. – [21] Attwood, Text-Book of Theoretical Naval Architecture, London 1899. – [22] Peabody, Naval Arch., New York 1904.
T. Schwarz.

Buchempfehlung
Wilbrandt, Adolf von
Gracchus der Volkstribun. Trauerspiel in fünf Aufzügen

Die Geschichte des Gaius Sempronius Gracchus, der 123 v. Chr. Volkstribun wurde.
62 Seiten, 4.80 Euro
Im Buch blättern
Ansehen bei Amazon
Buchempfehlung
Geschichten aus dem Sturm und Drang. Sechs Erzählungen

Zwischen 1765 und 1785 geht ein Ruck durch die deutsche Literatur. Sehr junge Autoren lehnen sich auf gegen den belehrenden Charakter der - die damalige Geisteskultur beherrschenden - Aufklärung. Mit Fantasie und Gemütskraft stürmen und drängen sie gegen die Moralvorstellungen des Feudalsystems, setzen Gefühl vor Verstand und fordern die Selbstständigkeit des Originalgenies. Michael Holzinger hat sechs eindrucksvolle Erzählungen von wütenden, jungen Männern des 18. Jahrhunderts ausgewählt.
- Jakob Michael Reinhold Lenz Zerbin oder Die neuere Philosophie
- Johann Karl Wezel Silvans Bibliothek oder die gelehrten Abenteuer
- Karl Philipp Moritz Andreas Hartknopf. Eine Allegorie
- Friedrich Schiller Der Geisterseher
- Johann Wolfgang Goethe Die Leiden des jungen Werther
- Friedrich Maximilian Klinger Fausts Leben, Taten und Höllenfahrt
468 Seiten, 19.80 Euro
Ansehen bei Amazon
- ZenoServer 4.030.014
- Nutzungsbedingungen
- Datenschutzerklärung
- Impressum