Rädergetriebe
[549] Rädergetriebe (Räderwerke), eine Verbindung von Rädern und deren zugehörigen Wellen (Achsen), derart, daß eine Bewegungs- und Kraftübertragung zwischen ihnen möglich ist. Jedes R. besteht aus mindestens zwei auf je einer Welle sitzenden Rädern, wobei die von der einen Welle ausgehende, ihr irgendwie erteilte Drehbewegung durch das mit ihr verbundene treibende Rad auf das andre, das getriebene Rad, und somit auf dessen Welle übertragen wird. Eine solche Räderverbindung wird auch als (Räder-) Vorgelege bezeichnet. Die miteinander arbeitenden Räder haben glatte (auch mehr oder weniger rauhe) Umfangsflächen, oder am Radumfange befinden sich Zähne und Zahnlücken, wonach man Reibungs- oder Friktionsrädergetriebe und Zahnrädergetriebe unterscheidet. Findet die Bewegungs- und Kraftübertragung bei unmittelbarer Berührung der Räder statt, dann hat man ein direktwirkendes R., wird sie dagegen durch ein Zwischenglied (Riemen, Seil, Kette) vermittelt, dann hat man ein indirektwirkendes R.
Bei den direkt wirkenden Reibungsrädern erfolgt die Mitnahme des einen Rades durch das andre infolge der Reibung zwischen den sich unter Pressung berührenden Radumfangsflächen. Indirekt wirkende Reibungsrädergetriebe sind der Riementrieb (s. d.) und der Seiltrieb (s. d.). Um die miteinander arbeitenden Räder (Riemenscheibe, Seilscheibe) ist hierbei mit Spannung ein endloses, biegsames Zugorgan (Riemen, Seil) geschlungen. Der auftretende Reibungswiderstand zwischen Radumfang und Riemen, bez. Seil bildet die mitnehmende Kraft, die von dem treibenden Rad auf das Zugorgan und von diesem wieder auf das getriebene Rad wirkt. Bei den Zahnrädern, die direkt wirkend sind, greifen die Zähne des einen Rades in die Zahnlücken des andern, wobei unter Drehung der Räder die miteinander in Berührung stehenden Zahnflächen auseinander gleiten. Legt man eine endlose Gelenkkette um zwei sich nicht berührende gezahnte Räder (Kettenräder) derart, daß zwischen je zwei Gelenkbolzen der Kette ein Zahn des Rades eingreift, dann entsteht als indirekt wirkendes Zahnrädergetriebe der Kettentrieb. Bei den Zahnrädern und beim Kettentrieb vollzieht sich infolge des Eingreifens der Zähne eines Rades in die Zahnlücken eines andern, bez. zwischen die Gelenkbolzen einer Kette die Bewegungsübertragung vollkommen gezwungen. Zahnrädergetriebe gewährleisten deshalb eine präzise Bewegungsübertragung. Für die Reibungsrädergetriebe besteht ein solcher Bewegungszwang nicht in gleichem Maß insofern, als ein Gleiten der Radumfänge auseinander, bez. des Riemens oder Seiles auf dem Radumfang eintreten kann, falls die Reibung zwischen den sich berührenden Teilen nicht groß genug ist. Dies ist vorteilhaft in allen Fällen, in denen wegen auftretender Stöße oder aus andern Gründen eine gewisse Nachgiebigkeit in der Bewegungs- und Kraftübertragung erwünscht ist.
Nach der gegenseitigen Lage der Achsen der Räder unterscheidet man verschiedene Radformen und Anordnungen des Rädergetriebes. Sind die Achsen parallel, dann ergeben sich zylindrische Reibungsräder oder Keilräder, der offene und gekreuzte Riementrieb, der Seiltrieb, Stirnräder (bei Zahnrädern), der Kettentrieb etc. Für sich schneidende Achsen erhält man kegelförmige Reibungs- oder Zahnräder (Kegelräder, konische Räder), den Riemen- und Seiltrieb mit Leitrollen etc. Kreuzen sich die in verschiedenen Ebenen liegenden Achsen, dann dienen zur Bewegungsübertragung der geschränkte Riementrieb, der Seiltrieb mit Leitrollen, von den Zahnrädern die Hyperboloid-, Schrauben- und Schneckenräder etc. Fallen die Achsen zweier Räder in eine Linie zusammen, dann entsteht eine Kuppelung (s. d.).
Im allgemeinen erfolgt bei Rädergetrieben die Bewegungsübertragung, indem die wirklichen Radumfänge auseinander abrollen oder so, als wenn ein Abrollen der wirklichen oder gewisser gedachter Radumfänge auseinander stattfände. Die Geschwindigkeit des Radumfanges (Umfangsgeschwindigkeit) und die tangential am Umfang auftretende Kraft (Umfangskraft) beider miteinander arbeitender Räder ist deshalb gleich. Dagegen steht die Winkelgeschwindigkeit und die Anzahl der gleichzeitig ausgeführten Umläufe (Touren) zu den Radumfängen (bei Zahnrädern auch zu der Anzahl der Zähne) und somit zu den Radien in umgekehrtem Verhältnis. Bezeichnen w1 und w2, n1 und n2, r1 und r2, z1 und z2 die Winkelgeschwindigkeiten, bez. minutlichen Umdrehungszahlen, Radien und Zähnezahlen zweier Räder, dann ist das sogen. Übersetzungsverhältnis = w1/w2 = n1/n2 = r2/r1 = z2/z1. Diese Beziehungen gelten nur für runde Räder (deren Übersetzungsverhältnis konstant bleibt) mit Ausnahme der Hyperboloid- und Schraubenräder, bei denen ein Aufeinanderrollen der[549] Radumfänge nur in beschränktem Maß oder gar nicht stattfindet, dagegen axiale Verschiebungen auftreten. Die Größe des Übersetzungsverhältnisses zwischen den Rädern eines Räderpaars ist aus praktischen Rücksichten innerhalb gewisser Grenzen zu halten, weshalb man sehr häufig mehrfache Vorgelege, d. h. Kombinationen von mehreren Räderpaaren, anwendet. Man erhält das Gesamtübersetzungsverhältnis durch Multiplikation der Übersetzungsverhältnisse der einzelnen Räderpaare. Soll das Übersetzungsverhältnis zwischen zwei Wellen sich fortwährend periodisch ändern, so werden unrunde Räder (exzentrische, Ellipsen-, Polygonalräder etc.) angewandt. Wünscht man dem Übersetzungsverhältnis verschiedene, bestimmte Werte geben zu können, so geschieht dies durch auswechselbare Räder, aus- und einrückbare Vorgelege und Stufenscheiben. Eine beliebige Änderung des Übersetzungsverhältnisses innerhalb gewisser Grenzen gestatten die Wechselgetriebe (s. d.). R., die eine Änderung der Bewegungsrichtung zulassen, heißen Wendegetriebe (s. d.).
Von eigentümlicher Konstruktion sind die Differentialgetriebe. Das einfachste Differentialgetriebe besteht aus zwei gleich großen aneinander liegenden Rädern, von denen das eine einen oder mehrere Zähne mehr besitzt als das andre. Greift in diese ein doppelt so breites drittes Rad gleichzeitig ein, so muß bei einer ganzen Umdrehung des einen Grundrades das anliegende um den Unterschied der Zähne zurückbleiben, welche Differenzbewegung sowohl für Kraftübertragungen als auch für Zählwerke verwendet wird. Eine andre Art der Differentialgetriebe bilden die sogen. Planeten- oder Umlaufgetriebe. Hier befinden sich (Fig. 1) auf ein und derselben Achse E frei drehbar die beiden Kegelräder A und B sowie der Arm C, auf dessen Enden wiederum zwei (eins wäre genügend) in die erstern eingreifende kleinere Kegelräder, die Planetenräder DD, drehbar sind.
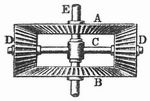
Mit diesem Getriebe kann man folgende sehr verschiedene Bewegungsübertragungen ausführen: 1) Denkt man zunächst das untere Rad B feststehend und das obere A nach einer Richtung gedreht, so dreht sich durch Vermittelung der Räder D der Arm C in derselben Richtung mit, jedoch mit nur halb so großer Winkelgeschwindigkeit, d. h. wenn A z. B. eine ganze Umdrehung gemacht hat, so ist C erst 1/2mal herumgegangen. 2) Setzt man dagegen C in Umdrehung und hält B fest, so läuft A in derselben Richtung mit und zwar mit doppelt so großer Winkelgeschwindigkeit wie C. 3) Dreht man C und hält keins der beiden Räder A und B fest, so können diese verschiedene Geschwindigkeiten annehmen. 4) Hält man C fest, so drehen sich A und B, ob nun bei A oder B die Bewegung eingeleitet wird, mit gleicher Winkelgeschwindigkeit, aber in umgekehrter Richtung. 5) Erteilt man aber nun, ohne irgend ein Stück festzustellen, beiden Rädern gleichzeitig eine Drehung und zwar zunächst in dem gleichen Sinn, so nimmt auch C an der Drehung in demselben Sinn teil mit einer Winkelgeschwindigkeit, die der halben Summe der beiden Winkelgeschwindigkeiten von A und B entspricht. Hat sich also A einmal, B 1/2mal umgedreht, so hat dabei C eine Umdrehung von (1+1/2)/2 = 3/4 Kreis gemacht. 6) Dreht man A und C zugleich in demselben Sinne, so erhält B eine Drehung von der doppelten Drehung von C, vermindert um die einfache von A. (Wenn also C doppelt so schnell läuft wie A, so steht B still.) 7) Dreht man A und B im umgekehrten Sinne, so rotiert C mit einer der Differenz der Winkelgeschwindigkeit von A und B entsprechenden Winkelgeschwindigkeit (daher besonders der Name Differentialgetriebe) und zwar in demselben Drehungssinn mit demjenigen Rade, das die größte Drehung macht. Bei gleicher Winkelgeschwindigkeit von A und B steht C still. 8)

Werden A und C in entgegengesetztem Sinne gedreht, so rotiert B mit der doppelten Winkelgeschwindigkeit von C, vermehrt um die einfache von A. Die Differentialrädergetriebe werden auch aus Stirnrädern (Fig. 2) mit der Fig. 1 entsprechenden Buchstabenbezeichnung hergestellt. Hier werden die Bewegungsverhältnisse komplizierter, weil noch das Verhältnis der Durchmesser von A und B von Einfluß ist. Die Planeten- oder Umlaufgetriebe finden in der Technik mehrfach Anwendung, z. B. bei den Barrett und Andrewsschen Göpeln (Fall 2), bei den sogen. Spindelbänken (Flyern) in der Spinnerei (Fall 7), auch bei Buchdruckschnellpressen zur Bewegung des sogen. Fundaments, in welch letzterm Fall jedoch die Räder A und B als Zahnstangen ausgeführt sind, bei Motorwagen (Fall 3).
Soll die durch ein R. übertragene Bewegung zeitweilig unterbrochen werden, so bringt man Ausrückvorrichtungen an, die je nach der Art des Räderwerkes verschieden eingerichtet sind. Vgl. Keller, Berechnung und Konstruktion der Triebwerke (3. Aufl., Münch. 1898); Reuleaux, Der Konstrukteur (4. Aufl., 4. Abdruck, Braunschw. 1899); Bach, Die Maschinenelemente (9. Aufl., Stuttg. 1903, 2 Bde.).
Buchempfehlung
Brachvogel, Albert Emil
Narziß. Ein Trauerspiel in fünf Aufzügen

Albert Brachvogel zeichnet in seinem Trauerspiel den Weg des schönen Sohnes des Flussgottes nach, der von beiden Geschlechtern umworben und begehrt wird, doch in seiner Selbstliebe allein seinem Spiegelbild verfällt.
68 Seiten, 8.80 Euro
Im Buch blättern
Ansehen bei Amazon
Buchempfehlung
Romantische Geschichten. Elf Erzählungen

Romantik! Das ist auch aber eben nicht nur eine Epoche. Wenn wir heute etwas romantisch finden oder nennen, schwingt darin die Sehnsucht und die Leidenschaft der jungen Autoren, die seit dem Ausklang des 18. Jahrhundert ihre Gefühlswelt gegen die von der Aufklärung geforderte Vernunft verteidigt haben. So sind vor 200 Jahren wundervolle Erzählungen entstanden. Sie handeln von der Suche nach einer verlorengegangenen Welt des Wunderbaren, sind melancholisch oder mythisch oder märchenhaft, jedenfalls aber romantisch - damals wie heute. Michael Holzinger hat für diese preiswerte Leseausgabe elf der schönsten romantischen Erzählungen ausgewählt.
- Ludwig Tieck Die beiden merkwürdigsten Tage aus Siegmunds Leben
- Karoline von Günderrode Geschichte eines Braminen
- Novalis Heinrich von Ofterdingen
- Friedrich Schlegel Lucinde
- Jean Paul Die wunderbare Gesellschaft in der Neujahrsnacht
- Adelbert von Chamisso Peter Schlemihls wundersame Geschichte
- E. T. A. Hoffmann Der Sandmann
- Clemens Brentano Die drei Nüsse
- Ludwig Achim von Arnim Der tolle Invalide auf dem Fort Ratonneau
- Wilhelm Hauff Jud Süss
- Joseph von Eichendorff Das Schloß Dürande
442 Seiten, 16.80 Euro
Ansehen bei Amazon
- ZenoServer 4.030.014
- Nutzungsbedingungen
- Datenschutzerklärung
- Impressum